From Prompt to Pixels — SAM 3.1 as a Local Video Operator
Apr 26, 2026
Notes from running Meta’s Segment Anything 3.1 on Apple Silicon via MLX
While experimenting with SAM 3.1 (Segment Anything Model 3.1) on local hardware, I hit a moment that felt less like “running a model” and more like having an operator I could steer in English. I pointed it at dashcam footage of a busy highway interchange and asked—not for a caption—for a directional vehicle count. The stack answered. The numbers matched what I could verify by eye.
If you had to build traffic flow analytics or layer-aware compositing from raw video, how would you do it?
One workable answer today is: treat segmentation + tracking as the primitive, and push semantics (left vs. right, foreground vs. background) into a thin layer of code on top.
Mental Model: Classification vs. Operator
Most people’s picture of “vision AI” is classification: image in, label out. That was remarkable in 2012; in 2026 it is baseline.
SAM 3.1 is doing something closer to instance geometry:
- You specify what you care about in natural language
- The model returns masks—exact outlines—not just categories
- Those masks persist across frames as tracks (IDs, colors, continuity)
So the useful abstraction is not “what is this frame about?” but “which pixels belong to which object over time?”
Traditional mental model SAM 3.1 mental model
| |
Photo → Label Video + Prompt → Masks + Tracks
| |
"car" (one tag) Car₁, Car₂, … Carₙ per frame
|
Stable IDs across timeWhat the Stack Optimizes For (Locally)
The runs I care about here are offline-friendly and privacy-preserving:
- No cloud — weights and inference on the machine
- No API round-trips — latency is compute-bound, not network-bound
- Plain-English prompts — the interface is language, not hand-tuned CV pipelines
Concretely: mlx-community/sam3.1-bf16 on MLX, 873M parameters, on Apple Silicon.
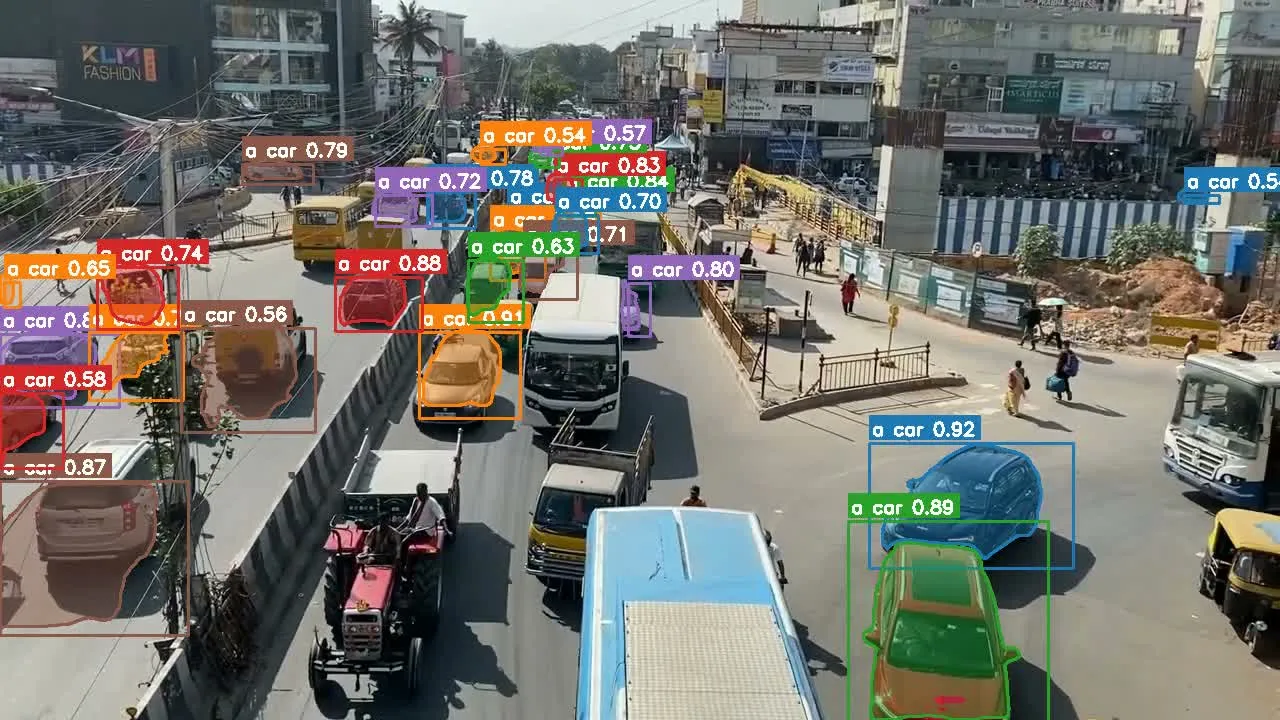
Experiment 1 — Highway: From Masks to a Directed Count
Input: ~53 seconds of 720p overpass footage.
Prompt: "a car".
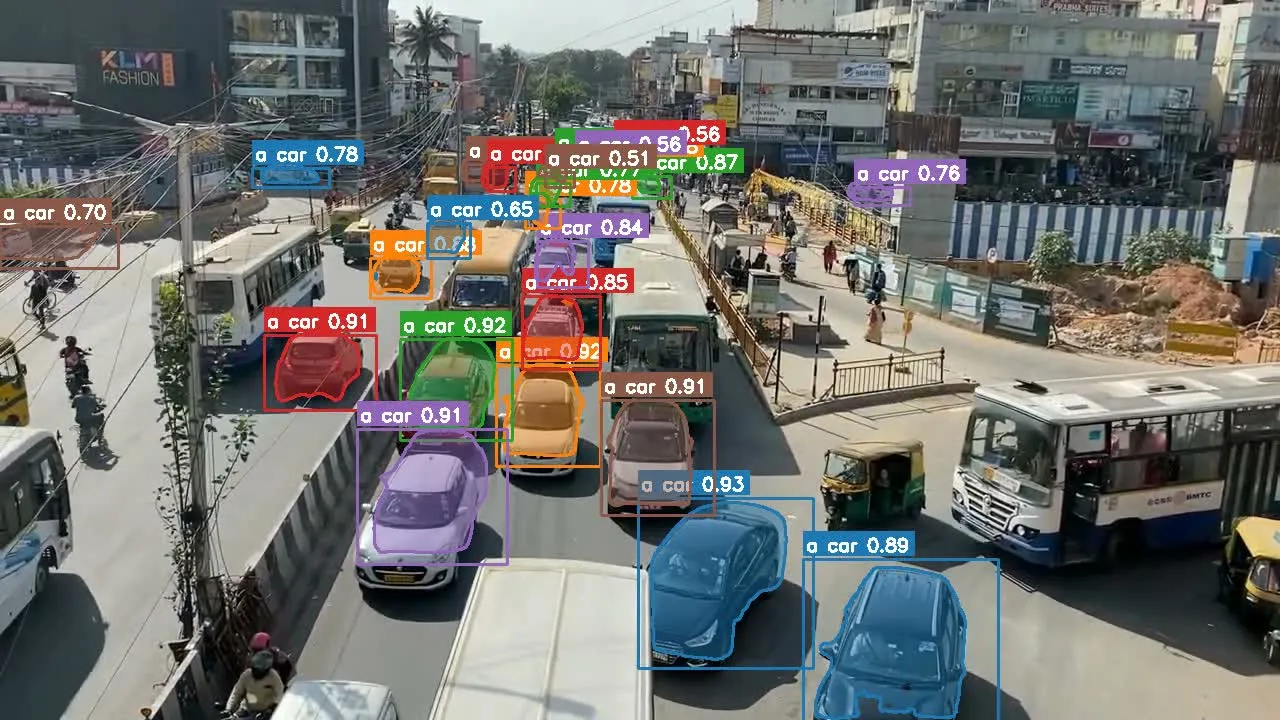
Observation: Per-frame instance counts bounced in a band (roughly 19–28 vehicles), which is expected—occlusion, merge/split, and frame boundaries are hard. What mattered more was track continuity: each vehicle kept an ID, mask, and trajectory long enough to reason about dominant side of frame / road.
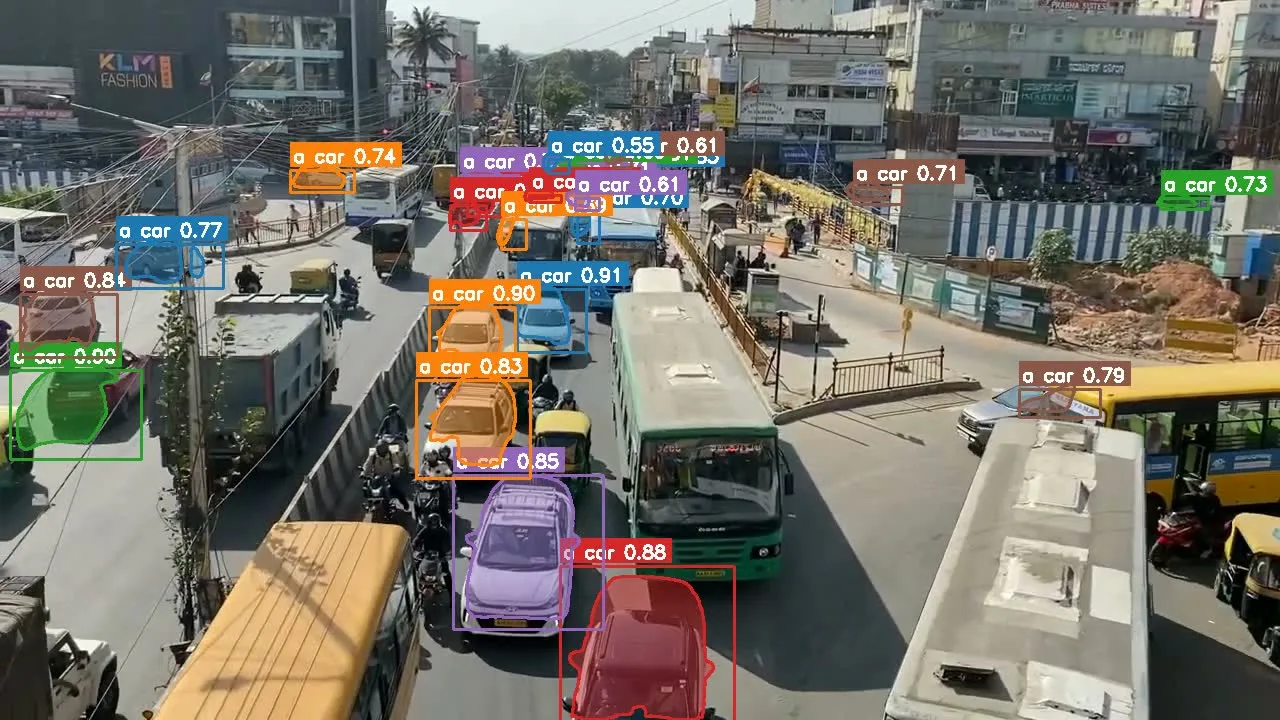
I wrote a small post-processing step: from track geometry, classify which side of a split line each track spent most of its lifetime on, then aggregate.
Result:
| Direction | Count | Share |
|---|---|---|
| Left lane | 408 | 70.1% |
| Right lane | 174 | 29.9% |

Raw frames
|
v
SAM 3.1 (prompt: "a car")
|
v
Per-frame masks + track IDs
|
v
Heuristic: dominant side of split line per track
|
v
Directional flow statistics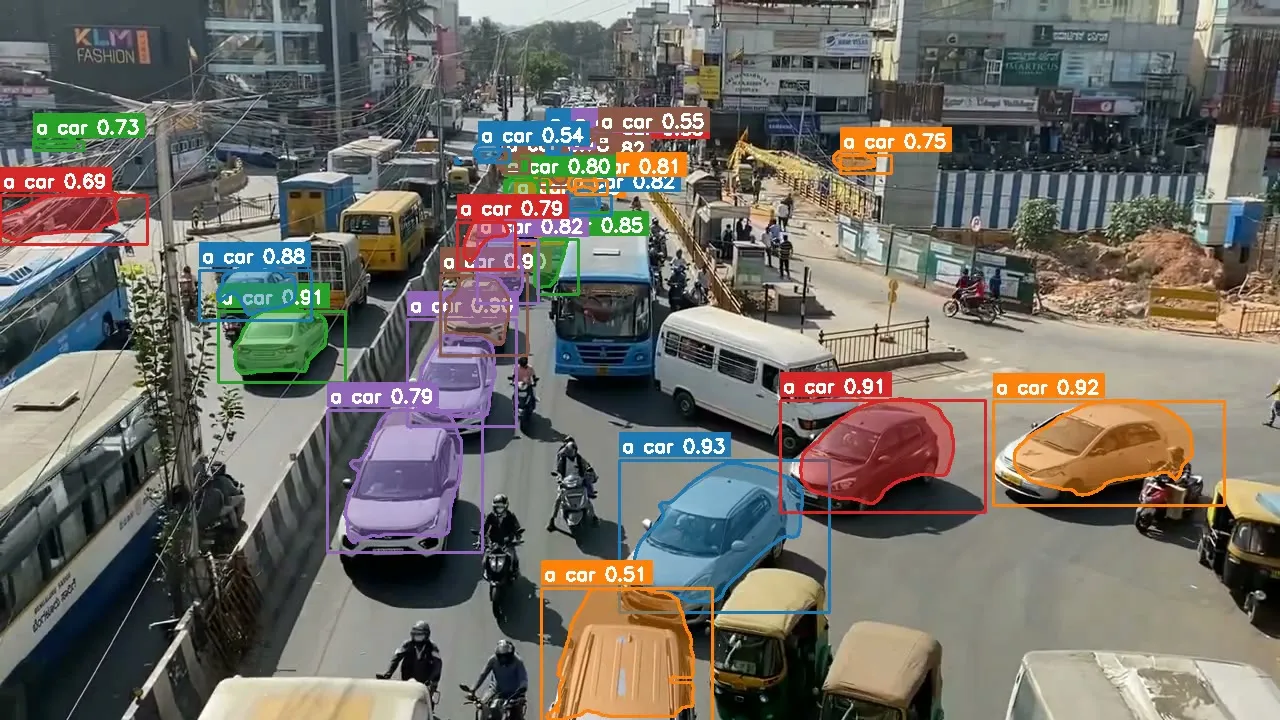
Takeaway: the “heavy” part—find instances and keep them coherent—is delegated to the model. The “thin” part—geometry + aggregation—is ordinary code. That split is the design win.
Experiment 2 — Detection Cadence: Trading Accuracy for Throughput
Default behavior effectively re-detects every frame. On 720p hardware here, that landed near ~0.5 fps—fine for batch analysis, unusable for interactive loops.
SAM exposes a --every N knob: full detection every N frames, propagation in between.
| Detection cadence | Approx. speed (720p) |
|---|---|
| Every frame | ~0.5 fps |
| Every 5 frames | ~3.0 fps |
| Every 15 frames | ~7.8 fps |
At every 15, the tracker’s interpolation is smooth enough that, for many UIs, the shortcut is invisible—until you freeze-frame and hunt for edge cases.
Every frame Every N frames
| |
Full detect each step Detect ──► Propagate ──► Propagate ──► …
| |
High fidelity masks Lower CPU/GPU duty cycle
| |
~0.5 fps (here) ~7–8 fps (here, N=15)Experiment 3 — Compositing: A Depth List Instead of One Mask
Goal: the “text sandwiched between environment and subject” effect (background → text → foreground).
Naive approach: segment the person; paste text behind. Works until desk, mic, bottle, tablet should also occlude the text—you either fight with rotoscoping or you enumerate foreground.
Better approach: define a foreground set; union masks; composite in three layers.
FOREGROUND_OBJECTS = [
"a person",
"a wooden table",
"a bottle",
"an iPad",
"a microphone",
]SAM segments all prompts in one pass; the compositor does background → typography → union(foreground masks).
Layer stack (bottom → top):
[ Environment pixels ]
|
v
[ Text ]
|
v
[ Union(person, table, bottle, iPad, mic) ]Takeaway: once masks are cheap and prompt-driven, compositing becomes a configuration problem, not a hand-drawn matte problem.
The Insight That Actually Generalizes
What stuck is not any single demo. It is that SAM collapses the distance between intent (“these things belong in front”) and machine-manipulable state (per-pixel ownership over time).
Prompt → mask → program.
You stop hand-authoring detectors for every object class; you name what matters and operate on the pixels the model hands back.
That is closer to writing constraints for an operator than to classic OpenCV plumbing—different skill, different failure modes.
Limits (Honest Accounting)
- Wall time: a 53 s clip at conservative settings was on the order of ~6 minutes end-to-end here. “Real-time” at full HD is still aspirational; lower resolution (e.g. 224 px short side) is where live-ish tracking becomes plausible.
- Temporal noise: fast edges flicker without smoothing; an EMA across masks fixes a lot of it but needs tuning.
- Semantics: the model gives you shapes and categories, not causality. It will not explain why the left lane is busier—only that the pixels were there.
Where This Goes
The trajectory is unambiguous: faster silicon, better propagation, tighter integration with capture pipelines. Tomorrow’s constraint is less “can it segment?” and more “what do you ask it to pay attention to?”
That question is already the interface SAM forces you to answer—one English prompt at a time.
End result: a local, prompt-driven video operator that turns “describe what matters” into masks and tracks you can feed normal code—counts, dashboards, editors—without standing up a CV lab first.
References
- mlx-community/sam3.1-bf16 (weights)
- MLX (Apple Silicon framework)
- Meta’s SAM family (Segment Anything) — see official docs and model cards for capability boundaries